IAR быстрый старт
|
IAR быстрый старт |
|
||
|
|
|
|
|
IAR-Fast.narod.ru IAR - быстрый старт. Программирование микроконтроллера AVR в IAR
|
Исходники программ и библиотекдля микроконтроллеров AVRАвтор: Waso Dec 19 2005, 19:29Предлагаю сюда скидывать (кому не жалко) свои инклюды для
работы с периферийными устройствами, предназначенные для
работы в IAR. Дело в том, что например для WinAVR такую
библиотеку можно найти в http://ccrma.stanford.edu/courses/250a/docs/avrlib/main.html.
CodeVision имеет свою библиотеку. А ИАР этим не богат.
Приходится либо писать свое с нуля, либо переделывать то что
есть. Гемора в этих двух занятиях поровну. Автор: haker_fox Dec 20 2005, 04:03Может быть сюда вообще выкладывать различные подпрограммы,
для работы не только с периферией, но и например математику,
сортировку, обработку данных и т.п. Автор: at90 Dec 20 2005, 09:23Вот библиотечка для работы с ЖКИ 16x2 и жк ht1611. Автор: at90 Dec 20 2005, 10:46Библиотека для работы с датафлэшем at45 Автор: Nixon Dec 21 2005, 11:45В данном топике предлагается выкладывать различные
исходные тексты программ и библиотек (как своих так и не
очень
Автор: at90 Dec 21 2005, 13:14Хороший проект с Атмеловского контеста. Вэб камера и AVR Автор: aai_m Dec 21 2005, 16:07
Автор: Серега Dec 24 2005, 23:31Библиотека для 25lc640. Автор: *SERG Dec 26 2005, 06:14много примеров и исходников Автор: haker_fox Dec 27 2005, 03:49Это архив студенческих проектов Американского
университета с 1999 по 2004. Есть и радары (ИК,
Ультразвук.), и GPS-приемники, и видео игры, и музыкальные
синтезаторы. Автор: Alechin Jan 11 2006, 18:22Вот мои используемые практически в каждом проекте
наработки: Автор: DeXteR Jan 18 2006, 16:24Написал h файл для тех кто любит записи типа 0bxxxxxxxx в
АСМ Автор: Мах Jan 20 2006, 12:51Не столько библиотека как исходник для подключения памяти
at24c256 через twi. Проверено на железе. У меня все
прекрасно работает на atmega16.
Автор: Balaganov Jan 23 2006, 20:49
(Balaganov @ Jan 19 2006, 18:01)
 Хидер задержек для IAR. Использует __delay_cycles для формирования задержек от наносекунд до секунд. В параметре CPU_CLK_Hz указать тактовую частоту в герцах.[attachmentid=3956] Сори не тот файл выложил, он в принципе рабочий, но до 2 с копейками МГц. Вот последний вариант  delay.h.txt
( 379байт ) Кол-во скачиваний: 1319
delay.h.txt
( 379байт ) Кол-во скачиваний: 1319
Автор: Nikola Kirov Jan 25 2006, 03:57Калкулатор boudrate для Usarta. Автор: afe Jan 26 2006, 01:48Както не хватает: [b]Procyon AVRlib Overview[/b]
Автор: Proton Jan 29 2006, 20:50Преобразователь *.ebn в *.hex. Хоть таких файлов и не
очень много(jtagice,stk500), может кому-нибудь пригодиться.
Замечания и предложения слать в личку. Автор: haker_fox Feb 3 2006, 12:36Прошу оценить мое сромное творчество, буду признателен,
если сообщите о багах... Автор: ЛЕСЯ Feb 6 2006, 14:37haker_fox Как насчет выложить библтотеку для работы с
протоколом WAKE?
Есть еще библиотека для работы с протоколом
WAKE
(http://www.spetspribor.com/support/software/wake/wake.html),
если кого заинтересует, могу выложить.
Есть еще библиотека для работы с
протоколом WAKE
(http://www.spetspribor.com/support/software/wake/wake.html),
если кого заинтересует, могу выложить.
Автор: Evgeny_CD Feb 6 2006, 20:41
(afe @ Jan 26 2006, 01:48)
...Procyon AVRlib...
В тонкости не вдавался, но это сильно похоже
на эту либу для LPC2xxxhttp://hubbard.engr.scu.edu/embedded/arm/armlib/
Автор: haker_fox Feb 7 2006, 03:19
(ЛЕСЯ @ Feb 6 2006, 19:37)
haker_fox Как насчет выложить библтотеку для работы с протоколом WAKE?
Есть еще библиотека для работы с
протоколом WAKE
(http://www.spetspribor.com/support/software/wake/wake.html),
если кого заинтересует, могу выложить.
Есть еще библиотека для работы с
протоколом WAKE
(http://www.spetspribor.com/support/software/wake/wake.html),
если кого заинтересует, могу выложить.
Выкладываю... НО, там помимо самой реализации протокола, есть еще и команды, которые мой девайс выполняет по указанию компьютера, на них можно не обращать внимания. Вырезать не стал, дабы нечайно не попортить исходник. Сразу скажу, что в том виде, в котором модуль выложен, он работать не будет, т.к. часть программных счетчиков считается в другом модуле, где обрабатываются прерывания, да и ввел я их сам, для тайм-аутов... В общем исходники только для пояснения общей сути, за более подробным объяснением сюда http://www.spetspribor.com/support/software/wake/wake.html. В крайнем случае, если что, можно в PM спросить. Присоединённые файлы  wake.zip
( 7.03кб ) Кол-во скачиваний: 838
wake.zip
( 7.03кб ) Кол-во скачиваний: 838
Автор: alm_ Feb 16 2006, 12:50Модуль для работы с текстовым дисплеем 16x2 Автор: alm_ Feb 16 2006, 14:20Расчёт CRC16 Автор: Jatagan Mar 7 2006, 11:25Вылаживаю подпрограмму (Div24.asm) для беззнакового
делени 24-х битного числа. Автор: SasaVitebsk Apr 2 2006, 13:27В одном из моих проектов было много устройств I2C и I2C -
подобных (АЦП, ЦАП, 24сХХ и тд). Необходима была также
клавиатура и дисплей. А ножек контроллера катострофически не
хватало. Автор: Aquatik Apr 3 2006, 09:45SasaVitebsk опубликуй.. Очень хотелось бы посмотреть, для
развития. Иногда возникала такая же ситуация с большим
количеством i2c, решалось схемным путем... Заранее
благодарен.. Автор: SasaVitebsk Apr 4 2006, 00:41Заранее извиняюсь. Всё это начиналось давно. Только
появились 2313.
Автор: vesago Apr 6 2006, 13:50SasaVitebsk будь так любезен - выложи схемку в пдф или
картинкой. Автор: SasaVitebsk Apr 6 2006, 23:14Схема была в EAGLE для быстроты. Мелочи не рисовал, - они
понятны. Если не понятны можете писать на мыло
sasa@c32dvina.com или завести топик в основном разделе,
чтобы этот не загромождать. Да ещё пару моментов. Чтобы
testi2c работала необходимо для xp поместить файл smport.sys
в system32, для 95/98 smport.vxd в system.
Автор: GOP Apr 17 2006, 18:43Еще библиотека для разработчика есть практически все. Автор: SasaVitebsk Apr 20 2006, 23:36По просьбам трудящихся выкладываю дополнительно по теме
пульт i2c: Автор: prottoss May 22 2006, 17:46Выкладываю драйвер USARTа на Си, использующий кольцевые
FIFO буферы. В принципе ничего нового, подобное где то есть,
может даже в аппликухах Atmel, и я не претендую на
изобретение чего то нового. Но может кому пригодится. Много
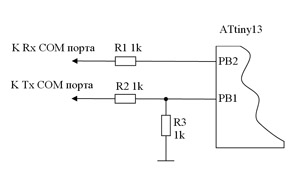
удобных #define))) Автор: defunct May 23 2006, 08:16Программный full-duplex UART для ATtiny13. С внутренним
осциллятором 9.6Mhz обеспечивает работу UART'a на скоростях
9600/19200/38400. Имеется возможность раздельной инверсии
линий Tx и Rx, что позволяет откзаться от применения
преобразователей уровней RS-TTL. Присоединенный проект
демонстрирует эхотерминал на скорости 38400, подключение к
COM порту показано на прикрепленном рисунке. Автор: prottoss May 30 2006, 17:15Привет всем! Автор: aleksey_g May 30 2006, 18:37
(prottoss @ May 30 2006, 17:15)
Привет всем! Стартовый исходник для символьных ЖКИ на основе HD44780. Красиво! Молодец. Хорошо постарался! Но рассчитывать задержки вручную? Не лучше ли так: #define XTALL 16.0 #define delay_us(us) __delay_cycles (XTALL * us); #define delay_ms(ms) delay_us (1000 * ms) По моему было бы еще удобнее.
Автор: prottoss May 30 2006, 18:50
(aleksey_g @ May 30 2006, 23:37)
(prottoss @ May 30 2006, 17:15)
Привет всем! Стартовый исходник для символьных ЖКИ на основе HD44780. Красиво! Молодец. Хорошо постарался! Спасибо...)
(aleksey_g @ May 30 2006, 23:37)
Но рассчитывать задержки вручную? Не лучше ли так: #define XTALL 16.0 #define delay_us(us) __delay_cycles (XTALL * us); #define delay_ms(ms) delay_us (1000 * ms) По моему было бы еще удобнее. Может быть так и лучше)
Автор: agnedbay Jun 9 2006, 14:32Вот поляк выложил аппаратный TWI для управления LCD
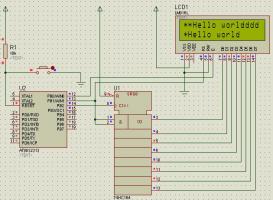
(CVAVR) Автор: Stas633 Jul 1 2006, 10:47Не смог найти готового, поэтому сделал свое.... Автор: TamTam Jul 6 2006, 10:00Библиотека и модель в PROTEUSE 6.9. sp4 для подключения
HD44780 всего по 3 проводам с использованием сдвигового
регистра 74HC164 МК. Компилятор CodeVisionAVR Автор: Wladimir_TS Aug 26 2006, 10:58Не уверен уместно-ли здесь просить какие - либо
исходники, но я попробую: Автор: SasaVitebsk Aug 31 2006, 21:41
(Wladimir_TS @ Aug 26 2006, 10:58)
Не уверен уместно-ли здесь просить какие - либо исходники, но я попробую: Необходима процедура вычисления логарифма с произвольным целым рснованием в диапазоне 2-10. Режим вычислений - с фиксированной точкой. требование - минимальный занимаемый объем. Ну очень надо - может кто ссылки где видел.  Нашёл у себя математику для 8051. Но переписать несложно. Присоединённые файлы
MATHLIB.rar
( 10.28кб ) Кол-во скачиваний: 803
Автор: andr_doy Sep 19 2006, 07:42RkLibAvr Автор: Георгий Sep 27 2006, 08:51To SasaVitebsk: Автор: SasaVitebsk Sep 27 2006, 18:01
(Георгий @ Sep 27 2006, 08:51)
To SasaVitebsk: А нельзя ли получить исходники тестовой программы со стороны РС. Меня больше эта часть интересует. Это по пульту? Писалась давно лет 5 назад. Потом я свои знания в DELFI оцениваю как нулевые и использую их только для написания тестовых программ. Оформительским способностями не обладаю и мне стыдно их выкладывать. Если честно. Так как они явно не могут являтся примером. Если сильно надо то перешлю. А вот есть у меня другая програмка. (с теми же вышеперечисленными недостатками). Я ей часто пользуюсь. Называю - осциллограф. Она позволяет просматривать файлы в виде цифровой информации от 1 до 8 лучей. Это когда модем писал. Сбрасывал на PC информацию и потом медленно просматривал. Поиск работает и всё такое. Могу выложить.
Автор: vesago Sep 27 2006, 22:39Выложите, будьте так любезны. Автор: SasaVitebsk Sep 28 2006, 03:35Например при обработке сложного последовательного
протокола происходит "прокол". Как его найти? У меня есть
стенд(а если не подходит стандартный, то делаю новый). И я с
МК сливаю данные на PC до 8 битов (например 2
последовательных канала приём/передача). Обычно мл.битом
вперёд хотя прога может и повернуть. Итак я записываю данные
в файл например 100Mb. Автор: Георгий Sep 28 2006, 07:31To SasaVitebsk: Автор: vesago Sep 28 2006, 12:11To SasaVitebsk: Автор: SasaVitebsk Sep 28 2006, 22:41
(vesago @ Sep 28 2006, 12:11)
To SasaVitebsk: Я так понял ваша программа пишет данные по битам 0 - 7 LPT порта. А драйвер какой надо для XP? Драйвера то есть. Но на счёт пишет я другой пользуюсь. Обычно. Там описание есть маленькое.  Драйвера я в пульте выкладывал. smport.vxd, smport.sys
Драйвера я в пульте выкладывал. smport.vxd, smport.sys Присоединённые файлы
St01.rar
( 177.84кб ) Кол-во скачиваний: 800
Автор: kamedi_clab Oct 8 2006, 20:01Шаблон для быстрого программирования в CVAVR и отладки в
VMLAB Автор: VitPushchin Oct 23 2006, 17:23А вот приемник ИК пульта от Самсунга (кодировка типа NEC,
но со своими особенностями). Автор: SasaVitebsk Nov 21 2006, 03:01Свой вариант библиотек LCD44780 и DS1820. Автор: Screw Nov 30 2006, 01:08Здравствуйте! Автор: yarunt Jan 4 2007, 15:14Если кому интересно ,как я поборол жки нокиа3510и. Автор: kuber Jan 9 2007, 02:03Проект на Pic Автор: Шалапут:-) Jan 11 2007, 07:56Поделюсь своим кодом на Ассме для организации меню на
буквенно цифровом дисплее HD4478 16х2.. В программе
реализована отправка строк с флеш памяти. При нажатии одной
из 4 кнопок происходит прерывание Int_1, затем его обработка
(со звуковым сигналом). Куда подключать кнопки и дисплей,
ясно из программы, динамик-через усилительный транзистор Автор: Stankov Roman Jan 12 2007, 04:03простенькая библиотека, заставляет контроллер делать
задержку, в мксекундах, мили секундах и снкундах. в
зависимости от частоты тактового генератора.
#include <intrinsics.h> //функции циклов
#define f_cpu (1000000) //Частота задающего генератора #define delay_us(temp) (__delay_cycles((temp * f_cpu) / 1000000)); /* макрос задержки на "temp" микросекунд. чочная задержка при целом значении задающей частоты генератора в МГц (1, 2, 3, 4, ..., 10, 11, ...) */// 571 + 2, 387 + 2 #define delay_ms(temp) (__delay_cycles((temp * f_cpu) / 1000)); /* макрос задержки на "temp" миллисекунд. чочная задержка при целом значении задающей частоты генератора в кГц (1, 2, 3, 4, ..., 10, 11, ...) */ #define delay_s(temp) (__delay_cycles(temp * f_cpu)); /* макрос задержки на "temp" секунд. чочная задержка при целом значении задающей частоты генератора в Гц (1, 2, 3, 4, ..., 10, 11, ...) */
Автор: Yuriy_AVR Jan 16 2007, 23:08Может кому будет полезно очень быстрое преобразование
двоичного ( 4-х байтного ) числа в двоично-десятичное число
. Собственный алгоритм . Взято из рабочей программы ;
некогда было окультуривать. Вполне можно перенести на Си .
Очень удобно когда есть неоходимость , например , вывода на
экран каких либо значений , которые считаются внутри в
двоичном виде . Автор: Fakir Jan 18 2007, 14:55на телесисах пробегала сылка на коллекцию исходников:
http://faq.embedders.org/_examples_code/ Автор: andybeg Jan 18 2007, 15:19Stankov Roman Автор: SasaVitebsk Jan 18 2007, 19:05
(andybeg @ Jan 18 2007, 13:19)
Stankov Roman библиотека #include <intrinsics.h> тоже твоя или к какому компилятору прилагается? IAR
Автор: Сергей Борщ Jan 21 2007, 04:19Часто появляются вопросы об удобном доступе к ножкам
порта. Несколько раз выкладывал в разных темах очень удобные
(как мне кажется) макросы. Решил выложить здесь наиболее
свежую версию, чтобы потом долго не искать. Пользоваться ими
так: #define LED1 PORTC,2,H // output, active high (led from PC2 to GND) #define LED2 PORTD,3,L // output, active low (led from Vcc to PD3) #define KEY1 PINB,5,L // input, active low (key from PB5 to GND, pull-up resistor) #define KEY2 PINC,7,H // input, active high (key from Vcc to PC7, pull-down resistor) #include "ascold.h" unsigned char Key1Status; unsigned char Key2Status; void main() { Key1Status = signal(KEY1); Key2Status = signal(KEY2); for(;;) { cpl(LED1); // toggle LED1 if(signal(KEY1)) // if KEY1 pressed, turn on LED2 on(LED2); else // otherwice turn off LED2 off(LED2); } }} Если в результате переразводки вывод поменялся, достаточно изменить лишь одну строчку #define Я использую с компилятором IAR для процессоров AVR, MSP430, AT91SAM7, LPC2xxx, ADuC70xx. Но они должны работать и с любым другим компиляторм. Присоединённые файлы
ascold.zip
( 1.15кб ) Кол-во скачиваний: 617
Автор: ReAl Jan 22 2007, 17:42
(Сергей Борщ @ Jan 21 2007, 00:19)
очень удобные (как мне кажется) макросы. Я тоже ими пользуюсь очень давно :-) Только signal() переименовал сразу же в bit_active() (ну и все остальные в bit_on/bit_off для однообразия). После какого-то давнего залёта со своей переменной с именем errno в борландовском С - не рискую применять имена, могущие пересечься с чем-то "очень стандартным".
Автор: Sergei Frolov Jan 30 2007, 19:34(* Вычисление дня недели в приложениях автоматического вычисления дня недели в датах от 1996 года и старше. Copyright (C) Sergei Frolov, 1998. v1.0 Jan, 4, 1998. Программа ориентирована на применение в приложениях, написанных на языке ассемблера без использования аппаратного умножения/деления и операций с плавающей запятой. *) program denned; const YEARS : array[0.. 3] of byte = (0, 2, 3, 4); MONTHS : array[1..12] of byte = (0, 3, 3, 6, 1, 4, 6, 2, 5, 0, 3, 5); DAYOFWEEKS : array[0..6] of string = ('Воскресенье', 'Понедельник', 'Вторник', 'Среда', 'Четверг', 'Пятница', 'Суббота'); var a, b, c, d, e, f, tmp : byte; day, month, year : word; begin repeat write('Число XX -> '); readln(day); if day = 0 then break; { выход } write('Месяц XX -> '); readln(month); write('Год XXXX -> '); readln(year); tmp := year - 1996; a := tmp and 3; b := (tmp shr 2) + (tmp and $FC); c := MONTHS[month]; if (a = 0) and (month > 2) then inc(c); a := YEARS[a]; e := (a + b + c + day) mod 7; writeln('Результат: ', DAYOFWEEKS[e]); writeln; until false; end.
Автор: Stankov Roman Feb 4 2007, 21:29да, эта библиотека входит в состав компилятора IAR. Автор: umup Feb 4 2007, 23:30Сергей Борщ #define LED1 PORTC,2,H // output, active high (led from PC2 to GND) Интересно, как у вас работают программы с комментариями // в #define, или компилятор это отлавливает ?
Автор: Сергей Борщ Feb 5 2007, 02:16
(umup @ Feb 4 2007, 19:30)
Сергей Борщ #define LED1 PORTC,2,H // output, active high (led from PC2 to GND) Интересно, как у вас работают программы с комментариями // в #define, или компилятор это отлавливает ?
Автор: yarunt Feb 6 2007, 17:14
(yarunt @ Jan 4 2007, 13:14)
Если кому интересно ,как я поборол жки нокиа3510и. Наступил на грабли .Есть два типа дисплея нокия3510и на одном; 4850277 10168p01317bp 0304280004 этот не удалось запустить никакую(посмертно)! другой u609b102aa s4 05 25 br с этим все ок. Отличаются они по расположению кондеров. фотка с правильным расположением кондеров! Присоединённые файлы
conekter.rar
( 173.53кб ) Кол-во скачиваний: 316
Автор: yarunt Feb 8 2007, 14:49
(yarunt @ Feb 6 2007, 15:14)
(yarunt @ Jan 4 2007, 13:14)
Если кому интересно ,как я поборол жки нокиа3510и. Наступил на грабли .Есть два типа дисплея нокия3510и на одном; 4850277 10168p01317bp 0304280004 этот не удалось запустить никакую(посмертно)! другой u609b102aa s4 05 25 br с этим все ок. Отличаются они по расположению кондеров. фотка с правильным расположением кондеров! Я сам офигел  оказывается дисплеи нокиа3510и инокиа3530 дисплеи абсолютно
идентичны,но команды немного отличаются!
оказывается дисплеи нокиа3510и инокиа3530 дисплеи абсолютно
идентичны,но команды немного отличаются! для 3530 команда 2с идет как оманда бит даты и команды в противофазе фазе! пины подключения абсолютно одинаковы на фотке слева3510 с права3530 Присоединённые эскизы 
Автор: GL_basik Feb 16 2007, 21:51Попробую здесь спросить. Автор: svlad Feb 17 2007, 22:53
(afe @ Jan 25 2006, 22:48)
Както не хватает: http://hubbard.engr.scu.edu/avr/avrlib/ [b]Procyon AVRlib Overview[/b]
Скачал AVRlib, а где мне взять interrupt.h и io.h которые они используют?
Автор: Kuzmi4 Feb 20 2007, 17:212 svlad - interrupt.h и io.h надо поставить винавр тогда
они появяться. Автор: andybeg Feb 20 2007, 18:41выложи конечно - интересно
Автор: svlad Feb 21 2007, 00:09
(Kuzmi4 @ Feb 20 2007, 14:21)
2 svlad - interrupt.h и io.h надо поставить винавр тогда они появяться. Если кому интересно могу выложить декодировку манчестера по INT0 для 8-й меги. не уж то ни у кого нет WinAVR?
Автор: Сергей Борщ Feb 21 2007, 13:20
(svlad @ Feb 20 2007, 20:09)
(Kuzmi4 @ Feb 20 2007, 14:21)
2 svlad - interrupt.h и io.h надо поставить винавр тогда они появяться. Если кому интересно могу выложить декодировку манчестера по INT0 для 8-й меги. не уж то ни у кого нет WinAVR? Присоединённые эскизы 
Автор: Kuzmi4 Feb 21 2007, 13:57Драсте всем! Автор: megachip Feb 24 2007, 03:53Шрифт от Нокии 6510 анг/рус для библиотеки
http://www.apetech.de/article.php?artId=1&nnId=10. Автор: prottoss Feb 25 2007, 19:21Выложил исходники своего программатора AVR910 USB. Автор: Kuzmi4 Feb 26 2007, 18:162 Beer - ну бывает... Автор: SasaVitebsk Feb 27 2007, 17:21Часто при работе с АЦП приходится делать таблицу
пересчёта. Например когда датчик нелинейный или когда
точность надо повысить. Кроме того иногда приходится
применять те или иные механизмы. Например (как в моём
случае) шаговый двигатель со стрелкой. Или простой ШД. В
этом случае значение АЦП должно непосредственно указывать на
положение стрелки (или механизма). Автор: Kuzmi4 Feb 27 2007, 18:30оки... сча вот порылся , нашёл проэкт.. сча заттачу усе
ф-ции - пользуйтесь,разбирайтесь.Хотя мож коряво написаны -
но писал давно, работают и ладно... Автор: yarunt Mar 20 2007, 13:22
(Waso @ Dec 19 2005, 17:29)
Предлагаю сюда скидывать (кому не жалко) свои инклюды для работы с периферийными устройствами, предназначенные для работы в IAR. Дело в том, что например для WinAVR такую библиотеку можно найти в http://ccrma.stanford.edu/courses/250a/docs/avrlib/main.html. CodeVision имеет свою библиотеку. А ИАР этим не богат. Приходится либо писать свое с нуля, либо переделывать то что есть. Гемора в этих двух занятиях поровну. Самому мне правда пока нечего выкинуь.  Наоборот, нужны исходники для стандартного текстового
ЖКИ-дисплея, клавиатуры 4х4, АЦП, ШИМ и
пользовательского интерфейса. Так как с ИАРом (и вообще
с Си) только знакомлюсь - дело идет медленно.
Наоборот, нужны исходники для стандартного текстового
ЖКИ-дисплея, клавиатуры 4х4, АЦП, ШИМ и
пользовательского интерфейса. Так как с ИАРом (и вообще
с Си) только знакомлюсь - дело идет медленно.Вот хочу выложить проэктик на алгоритмбилдере 4.8 . В нём инициалиация дисплея сименс сх65 тип LS020***. При удачной сборке должны быть 3 цветных полосы ,принажатой кнопки должен сработать позификатор и нарисовать в центре квадрат(тест на длинну проводков к дисплею). Присоединённые файлы
test_ls020.zip
( 10.81кб ) Кол-во скачиваний: 186
Автор: Qwertty Mar 20 2007, 14:26
(yarunt @ Mar 20 2007, 10:22)
Вот хочу выложить проэктик на алгоритмбилдере 4.8 В схеме включения диод повышающего конвертера для подсветки правильно нарисован?
Автор: yarunt Mar 20 2007, 15:19
(Qwertty @ Mar 20 2007, 12:26)
В схеме включения диод повышающего конвертера для подсветки правильно нарисован?  Диод правильно ,ошибка в том что LED_GND подключить надо на
землю. Питание подсветки около 9 в.
Диод правильно ,ошибка в том что LED_GND подключить надо на
землю. Питание подсветки около 9 в.
Автор: Qwertty Mar 20 2007, 15:40
(yarunt @ Mar 20 2007, 12:19)
Диод правильно ,ошибка в том что LED_GND подключить надо
на землю. Питание подсветки около 9 в.Правильно????? Тогда по другому спрошу - зачем нужны VT1 и L1? Если диод правильно стоит....
Автор: yarunt Mar 20 2007, 15:51
(Qwertty @ Mar 20 2007, 13:40)
Правильно????? Тогда по другому спрошу - зачем нужны VT1 и L1? Если диод правильно стоит.... Да точно диод не правильно стоял
Присоединённые эскизы 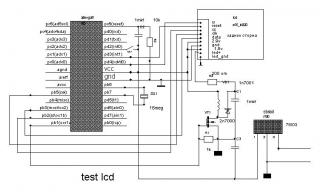
Автор: alecsvg Mar 28 2007, 10:11
(haker_fox @ Dec 20 2005, 02:03)
Может быть сюда вообще выкладывать различные подпрограммы, для работы не только с периферией, но и например математику, сортировку, обработку данных и т.п. Шрифты для граф.панели LCD ???
Есть панель WG12864 Интересуют русские шрифты 5х7. Где достать? Чем сделать мультики для неё (редактор графический с промотром созданного?)
Автор: SasaVitebsk Mar 29 2007, 18:52Фонты 6х8, 8х8 в виндовой кодировке начиная с кода 0x21.
Фонты пропорциональные. (Моноширинные) Автор: acex2 Mar 30 2007, 01:44
(SasaVitebsk @ Mar 29 2007, 16:52)
Фонты 6х8, 8х8 в виндовой кодировке начиная
с кода 0x21. Фонты пропорциональные. (Моноширинные)
Шрифт может быть или пропорциональным, или моноширинным.
Автор: SasaVitebsk Mar 30 2007, 02:16
(acex2 @ Mar 29 2007, 22:44)
Шрифт может быть или пропорциональным, или моноширинным. Ну простите опи`сался. Это моноширинные. Для других использую "разноширинные". То что это моноширинные легко видно с помощью элементарной математики. Если бы были разноширинные, то я бы дал более развёрнутую информацию по файлам. В связи с тем, что непонятно было бы как их использовать.
Автор: Kolia Mar 30 2007, 15:11Додрый день Автор: DeXteR Mar 30 2007, 16:51
(Kolia @ Mar 30 2007, 13:11)
Додрый день Есть архивчик программ - весит 82 Мега. http://rapidshare.com/files/7450315/AVR.rar.html пароль::gevv автор архива gevv - http://hyperelektronik.com/ http://www.edaboard.com/viewtopic.php?t=213262&highlight=archive Ктонибудь закачал ??? Если есть возможность - пожалуйста переложите куданибудь в удобный хостинг
Автор: xemul Mar 30 2007, 17:04
(DeXteR @ Mar 30 2007, 13:51)
Ктонибудь закачал ??? Если есть возможность - пожалуйста переложите куданибудь в удобный хостинг Через 20 минут будет в /upload/MCs/AVR/Projects/Gevv.rar Перепаковано без пароля и странных символов в именах файлов и директорий. .Done
Автор: plan Apr 10 2007, 11:28Привет ВСЕМ. Выкладываю рабочий проект для связи по
радиоканалу (сс2500) для CVAVR.Может где-то чего нибудь
криво так что сами подправите.Использовал библиотеки msp430.
Автор: prottoss Apr 10 2007, 18:37
(VAHOO @ Apr 10 2007, 20:28)
Привет prottoss! хочу с компилировать файл, но не компилируется пишет #error This file should only be compiled with iccavr or aavr with processor option -v1 в чем проблема, у меня IAR v 4.21, помоги пожалуйста!
#include <ioavr.h>
Ну и в меню Project->Options->General Options->Target выставить требуемый МК. Enjoy!:-)
Автор: Александр Куличок Apr 10 2007, 19:32
Не совсем исходники, но все же: Макросы для тех, кто работает с ассемблером + раскраска комментариев и макросов в ассемблере (AVRStudio) (копировать в .\AVR Tools\AVRStudio\Edit\) (раскраска директив компилятьра, комментариев разными цветами после ;* ;/ ;- ;+ плюс раскраска макросов) Не удалось присоединить файлы. Повторяю.
macros_v1.5.rar
( 743байт ) Кол-во скачиваний: 217
AvrStudio_asm.rar
( 1.85кб ) Кол-во скачиваний: 186
Автор: VAHOO Apr 11 2007, 11:48
(prottoss @ Apr 10 2007, 16:37)
В файле stdafx.h подключен хедер io8515.h. Его лучше всего заменить на ioavr.h вот так
#include <ioavr.h>
Ну и в меню Project->Options->General Options->Target выставить требуемый МК. Enjoy!:-) а "systime.h" откудо найти ??? если нетрудно отправ примерчик скажем бегушая строка, и если написал дока для етих библиотек, тоже отправ, я LCD подключил на PORTC , 4 бит, спасибо!
Автор: prottoss Apr 11 2007, 17:00
(VAHOO @ Apr 11 2007, 13:48)
а "systime.h" откудо найти ??? если нетрудно отправ примерчик скажем бегушая строка, и если написал дока для етих библиотек, тоже отправ, я LCD подключил на PORTC , 4 бит, спасибо!
Автор: by-pass Apr 14 2007, 02:01Класс для работы с CAN контроллера AT90CAN128. Автор: backa Apr 14 2007, 15:18
(Nanobyte @ Mar 31 2007, 23:12)
Э-э-э-хх, вот если бы залить по отдельным проектам, а то интересует 3-4 темы, а качать 82 МБ тяжко...  __tp://www.reverseelectronics.com/AVRproject/ тут в "розницу"
по-штучноВыбирай что нравиться и качай а тут фотки __tp://www.sonsivri.com/forum/index.php?topic=2303.0
Автор: umup May 15 2007, 06:22вот немного : Автор: Serg_greS Jun 9 2007, 07:02Вот нашел несколько вещей на досуге, думаю будет
интересно: Автор: Serg_greS Jul 4 2007, 14:24h_tp://barello.net/avrx/index.htm Автор: IgorKossak Jul 10 2007, 21:18Как то пытался использовать AVRx RTOS. Автор: Serg_greS Jul 31 2007, 12:42Еще немного библиотек adc.h Sample A/D converter driver, for multiple users button.h Sample API functions for using push-buttons buzzer.h Sample API functions for playing tunes on a piezo buzzer crc.h Functions that provide access to cyclic redundancy check calculation dev0470.h Functions specific to the dev0470 breakout board ember-types.h Ember data type definitions error-def.h Return code definitions for EmberZNet stack API functions error.h Return codes for Ember API functions and module definitions hal.h Generic set of HAL includes for all platforms iar.h Compiler/platform-specific definitions and typedefs for the IAR AVR C compiler led.h Sample API funtions for controlling LEDs micro.h Functions common across all microcontroller-specific files random.h Functions that provide access to random numbers reserved-ram.h Memory allocations that allow for data sharing between the normally running application and bootloader hal/micro/serial.h Serial hardware abstraction layer interfaces app/util/serial/serial.h High-level serial communication functions spi-protocol.h Example AVR SPI Protocol implementation for interfacing with EM260 spi.h Generic SPI manipulation routines system-timer.h Functions that provide access to the system clock avr-atmega/32/system-timer.h Functions that provide access to the system clock for ATmega32 microcontroller uart.h Prototypes and defines for the hardware-specific UARTs h__p://www.ember.com/pdf/EM250/HAL/
Автор: Kuzmi4 Aug 3 2007, 14:092 Serg_greS - оно конечно огромное спасибо, но как
добраться к тем хэдерам ? а то я там только одни дефайны
наблюдаю.... Автор: Serg_greS Aug 3 2007, 14:50
но как добраться к тем хэдерам
в смысле к самим реализациям? а не только прототипам? наверное все остальное в их ИДЕ h__p://www.ember.com/products_zigbee_development_tools_debuggers.html Стек EmberZNet предоставляется пользователям продукции Ember по запросу h__p://www.efo.ru/cgi-bin/go?2508#n21 и бесплатно (at90: Стэк Ембер как всегда даёт бесплатно.) http://electronix.ru/forum/index.php?s=&showtopic=12537&view=findpost&p=95173
Автор: dimka76 Aug 16 2007, 14:55пример проекта умножения с плавающей точкой. Автор: haker_fox Aug 17 2007, 03:16
QUOTE(dimka76 @ Aug 16 2007, 20:55)
пример проекта умножения с плавающей точкой. работает быстрее, чем стандартная Си операция благодаря использованию аппаратного умножителя. Подходит только для серии Mega  Прошу прощения, а разве современные компиляторы не умеют
использовать аппаратный умножитель? Или я Вас неверно понял?
Прошу прощения, а разве современные компиляторы не умеют
использовать аппаратный умножитель? Или я Вас неверно понял?
Автор: WHALE Aug 17 2007, 07:39Да вот CV тока недавно научили.Лень товарисчу было писать
2 библиотеки math-под тини и под мегу, Автор: АЛЕК@СЕЙ Sep 14 2007, 17:02Здраствуйте!Не бейте сильно если чего не так сморожу!
Автор: at90 Oct 1 2007, 09:35Вот куча исходников для AVR от немцев. Автор: sKWO Oct 3 2007, 21:27В общем книга всем известная по Си, в ПДФ. Автор: Сергей Борщ Oct 4 2007, 00:09
(sKWO @ Oct 3 2007, 21:27)
В общем книга всем известная по Си, в ПДФ.
Увы, первое издание, к тому же из текста
куда-то напрочь пропали фигурные скобки. С современным С
описанное в первом издании имеет много общего, но отличий
достаточно, чтобы не рекомендовать первое издание. А вот
второго в pdf не попадалось. Есть только в html
Автор: yarunt Oct 29 2007, 15:01rc-5 на Алгоритм билдере.Может кому пригодится. Автор: Waso Oct 31 2007, 07:06Выкладываю портированный мною под ИАР TCP-IP стек LwIP из
демо FreeRTOS для отладочной платы AT91SAM7X-EK. Он все еще
выдает некоторое количество варнингов, но они связаны с
выключенным дебагом. Работает web-сервер, отвечает на пинги.
Перед прошивкой нужно задать айпишники в хедере sam7_emac.h.
Версия lwIP - 1.1.0. Когда попытался прикрутить более новую
- удивился как много оставлено для дописывания ручками в
исходниках. Автор: INT1 Oct 31 2007, 16:41Здесь есть библиотеки для MODBUS Автор: umup Nov 6 2007, 14:21
Здесь есть библиотеки для MODBUS
что-то получается слишком большой размер кода. у меня RTU поместился в 500 байт Flash и 30 ОЗУ
Автор: INT1 Nov 6 2007, 20:51
(umup @ Nov 6 2007, 15:21)
что-то получается слишком большой размер кода. у меня RTU поместился в 500 байт Flash и 30 ОЗУ Дело еще в том, на сколько код "откатан" в железе. Немного поизучали эту тему, но в последствии выяснилось, что в реализации всего протокола нет необходимости, а возможные коллизии обошли таймаутами. В сети попадлись вопросы в этой связИ, вот еще ветка: http://www.fulcrum.ru/cgi-bin/bbs/mess_sel_i.pl?v=i&FID=1&TID=4245&page=&Sp=0&LID=0 Если Вы приаттачите свой исходик, то буду признателен.
Автор: umup Nov 6 2007, 22:31вот кусок : Автор: Сергей Борщ Nov 7 2007, 01:43
(Waso @ Oct 31 2007, 06:06)
Выкладываю портированный мною под ИАР
TCP-IP стек LwIP
А как все начиналось...
(Waso @ Dec 19 2005, 18:29)
Предлагаю сюда скидывать
... Самому мне правда пока нечего выкинуь.
Наоборот, нужны исходники для стандартного текстового
ЖКИ-дисплея, клавиатуры 4х4, АЦП, ШИМ и
пользовательского интерфейса.Пополню копилку. Даже не исходником, а полезным приемом. Навеяно несколькими вопросами в последнее время, когда "все не работает" потому что программа ушла в необъявленный обработчик прерывания. Можно поставить на все неиспользуемые обработчики заглушки, но, во-первых, это не решение, а расчалка и распорка. А во-вторых не всякий флаг прерывания сбрасывается от самого факта входа в обработчик. Т.е. попали в заглушку, вышли из нее, тут же снова попали... Заглушка позволяет локализовать проблему. Но если заглушек несколько, возникает вопрос - в какую из них попадает программа? Хорошо, если есть много свободных ног - можно в каждой заглушке махать своей ногой. Но опять же есть неудобство - искать точки на плате, куда подключиться осциллографом, и перебирать их щупом. Идея в том, чтобы использовать одну ногу, а конкретное место программы, где нога шевелится, определять по скважности генерируемого сигнала:
ISR(ADC_vect)
Отсчитать скважность можно буквально по клеткам на
экране.{ for(;;) { on(TEST); _nop(); _nop(); _nop(); off(TEST) } } ISR(UDRE_vect) { for(;;) { _nop(); on(TEST); _nop(); _nop(); off(TEST) } } ...... ISR(UDRE_vect) { for(;;) { _nop(); _nop(); on(TEST); _nop(); off(TEST) } } ....... ISR(TIMER2_COMP_vect) { for(;;) { _nop(); _nop(); _nop(); on(TEST); off(TEST) } } P.S. Тема получилась очень полезная и давно переросла подфорум AVR. Не пора ли ее переместить куда-то в более общее место?
Автор: ASZ Nov 15 2007, 09:41Мои 0,5 копейки: void ltoa_fmt(long val, s_char length, u_char *buff) { long ltemp; int itemp; s_char binc,atemp; u_char *ptr1, *ptr2; ptr1 = buff; if (val<0) { val = -val; *buff++ = '-'; } atemp='0'; ltemp=1000000; while(val >= ltemp) { atemp++; val-=ltemp; }; if(atemp != '0') *buff++=atemp; atemp='0'; ltemp=100000; while(val >= ltemp) { atemp++; val-=ltemp; }; if(atemp != '0') *buff++=atemp; atemp='0'; itemp=10000; while(val >= itemp) { atemp++; val-=itemp; }; if(atemp != '0') *buff++=atemp; atemp='0'; itemp=1000; while(val >= itemp) { atemp++; val-=itemp; }; if(atemp != '0') *buff++=atemp; atemp='0'; itemp=100; while(val >= itemp) { atemp++; val-=itemp; }; if(atemp != '0') *buff++=atemp; atemp='0'; binc=(char)val; while(binc >= 10) { atemp++; binc-=10; }; if(atemp != '0') *buff++=atemp; binc += '0'; *buff=binc; atemp = buff - ptr1 + 1; ptr2 = ptr1 + length-1; while(atemp--) *ptr2-- = *buff--; atemp = ptr2 - ptr1 + 1; while(atemp--) *ptr2-- = ' '; }
Автор: umup Nov 15 2007, 13:35bin2bcd AVR : u32 bin2bcd_u32(u32 data, u8 result_bytes) NAKED; u32 bin2bcd_u32(u32 data, u8 result_bytes) {asm volatile( "push __tmp_reg__ \n push r26 \n push r27 \n push r30 \n push r31 \n" "mov __tmp_reg__, %A1 \n" /*number of bytes in result*/ "bin2bcd_u32_00: \n" /*correct input number by left shifts*/ "mov r31, %A0 \n" "mov %A0, %B0 \n" "mov %B0, %C0 \n" "mov %C0, %D0 \n" "mov %D0, r31 \n" "dec __tmp_reg__ \n" "brne bin2bcd_u32_00 \n" "eor r26, r26 \n" /*clear result*/ "eor r27, r27 \n" "eor r30, r30 \n" "eor r31, r31 \n" "mov __tmp_reg__, %A1 \n" "lsl __tmp_reg__ \n lsl __tmp_reg__ \n lsl __tmp_reg__ \n" /*__tmp_reg__=size in bits*8*/ "bin2bcd_u32_01: \n" /*shift loop*/ "subi r26,-0x33 \n" /*add 0x33*/ "sbrs r26, 3 \n" /*if carry to bit 3,*/ "subi r26, 3 \n" /*subtract 3*/ "sbrs r26, 7 \n" /*if carry to bit 7,*/ "subi r26, 0x30 \n" /*subtract 0x30*/ "subi r27,-0x33 \n" /*add 0x33*/ "sbrs r27, 3 \n" /*if carry to bit 3,*/ "subi r27, 3 \n" /*subtract 3*/ "sbrs r27, 7 \n" /*if carry to bit 7,*/ "subi r27, 0x30 \n" /*subtract 0x30*/ "subi r30,-0x33 \n" /*add 0x33*/ "sbrs r30, 3 \n" /*if carry to bit 3,*/ "subi r30, 3 \n" /*subtract 3*/ "sbrs r30, 7 \n" /*if carry to bit 7,*/ "subi r30, 0x30 \n" /*subtract 0x30*/ "subi r31,-0x33 \n" /*add 0x33*/ "sbrs r31, 3 \n" /*if carry to bit 3,*/ "subi r31, 3 \n" /*subtract 3*/ "sbrs r31, 7 \n" /*if carry to bit 7,*/ "subi r31, 0x30 \n" /*subtract 0x30*/ "lsl r26 \n rol r27 \n rol r30 \n rol r31 \n" /*shift out buffer*/ "sbrc %D0, 7 \n" /*skip if msbit of input =0*/ "ori r26, 1 \n" /*set lsb of output*/ "lsl %A0 \n rol %B0 \n rol %C0 \n rol %D0 \n"/*shift input*/ "dec __tmp_reg__ \n" "brne bin2bcd_u32_01 \n" /*repeat for all bits*/ "movw r22, r26 \n" /*move result*/ "movw r24, r30 \n" "pop r31 \n pop r30 \n pop r27 \n pop r26 \n pop __tmp_reg__\n" "ret \n" : :"r"(data),"r"(result_bytes):"r0","r26","r27","r30","r31" /*input and output parameters*/ ); bin2bcd C : u32 bin2bcd_u32(u32 data, u8 result_bytes) {u32 result = 0; /*result*/ u8 u8_1; for (u8_1 = (4 - result_bytes); u8_1; u8_1--) data <<= 8; /*adjust input bytes*/ for (u8_1 = (result_bytes << 3); u8_1; u8_1--) /*bit shift loop*/ {u8 u8_2, u8_3; /*result BCD nibbles correction*/ result += 0x33333333; /*result correction loop*/ for (u8_3 = 4; u8_3; u8_3--) {u8_2 = result >> 24; if (!(u8_2 & 0x08)) u8_2 -= 0x03; if (!(u8_2 & 0x80)) u8_2 -= 0x30; result <<= 8; /*shift result*/ result |= u8_2; /*set 8 bits of result*/ } /*shift next bit of input to result*/ result <<= 1; if (((u8)(data >> 24)) & 0x80) result |= 1; data <<= 1; } return(result); } bcd2bin AVR (GCC) : u32 bcd2bin_u32(u32 data, u8 result_bytes) NAKED; u32 bcd2bin_u32(u32 data, u8 result_bytes) {asm("push __tmp_reg__ \n push r26 \n push r27 \n push r30 \n push r31 \n" "eor r26, r26 \n" /*clear result*/ "eor r27, r27 \n" "eor r30, r30 \n" "eor r31, r31 \n" "mov __tmp_reg__, %A1 \n" "lsl __tmp_reg__ \n lsl __tmp_reg__ \n lsl __tmp_reg__ \n" /*__tmp_reg__=input parameter size in bits*/ "bcd2bin_u32_00: \n" /*bits shift loop*/ "lsr r31 \n ror r30 \n ror r27 \n ror r26 \n" /*shift out buffer*/ "sbrc %A0, 0 \n" /*move lowest bit*/ "ori r31, 0x80 \n" "lsr %D0 \n ror %C0 \n ror %B0 \n ror %A0 \n" "sbrc %D0, 7 \n" /*if carry to bit 7,*/ "subi %D0, 0x30 \n" /*subtract 0x30*/ "sbrc %D0, 3 \n" /*if carry to bit 3,*/ "subi %D0, 3 \n" /*subtract 3*/ "sbrc %C0, 7 \n" /*if carry to bit 7,*/ "subi %C0, 0x30 \n" /*subtract 0x30*/ "sbrc %C0, 3 \n" /*if carry to bit 3,*/ "subi %C0, 3 \n" /*subtract 0x30*/ "sbrc %B0, 7 \n" /*if carry to bit 7,*/ "subi %B0, 0x30 \n" /*subtract 0x30*/ "sbrc %B0, 3 \n" /*if carry to bit 3,*/ "subi %B0, 3 \n" /*subtract 3*/ "sbrc %A0, 7 \n" /*if carry to bit 7,*/ "subi %A0, 0x30 \n" /*subtract 0x30*/ "sbrc %A0, 3 \n" /*if carry to bit 3,*/ "subi %A0, 3 \n" /*subtract 3*/ "dec __tmp_reg__ \n" /*repeat for all bits*/ "brne bcd2bin_u32_00 \n" "movw r22, r26 \n" /*adjust result bytes*/ "movw r24, r30 \n" "bcd2bin_u32_01: \n" "mov __tmp_reg__,r25 \n" "mov r25,r24 \n" "mov r24,r23 \n" "mov r23,r22 \n" "mov r22,__tmp_reg__ \n" "dec %A1 \n" "brne bcd2bin_u32_01 \n" "pop r31 \n pop r30 \n pop r27 \n pop r26 \n pop __tmp_reg__ \n" "ret \n" : :"r"(data),"r"(result_bytes):"r0","r26","r27","r30","r31" /*input and output parameters*/ ); } bcd2bin C : u32 bcd2bin_u32(u32 data, u8 input_bytes) {u32 result = 0; /*result*/ u8 cnt_bits, cnt_bytes, tmp_byte; for (cnt_bits = (input_bytes << 3); cnt_bits; cnt_bits--) {/*shift next bit*/ result >>= 1; if (((u8)(data)) & 0x01) result |= 0x80000000; data >>= 1; {/*BCD correction of result*/ for (cnt_bytes = 4; cnt_bytes; cnt_bytes--) {tmp_byte = (data >> 24); if (tmp_byte & 0x80) tmp_byte -= 0x30; if (tmp_byte & 0x08) tmp_byte -= 0x03; data <<= 8; data |= tmp_byte; } } } /*adjust result bytes*/ for (cnt_bits = (4 - input_bytes); cnt_bits; cnt_bits--) result >>= 8; return(result); } num2asc C - форматированный вывод числа с фикс.запятой в ASCI-буфер (options&7 = общее количество знаков, (options>>4)&7 = положение запятой считая справа, options&8 = 8 - отображать начальные нули, options&80 = 80 - сначала преобразовать в BCD) : void num2asc_s32(s32 data, u8 *buf, u8 options) {u8 cnt_chars, point_pos; cnt_chars = (options & 7); /*number of digits*/ /*convert negative to positive, set '-' flag*/ if (data < 0) {data = -data; options |= 1;} else options &= ~1; /*if necessary, convert to BCD*/ if (options & 0x80) data = bin2bcd_u32(data, (cnt_chars >> 1) + 1); cnt_chars++; /*calculate point position*/ point_pos = cnt_chars - ((options >> 4) & 7); if (point_pos) point_pos++; while (cnt_chars) /*digits conversion loop*/ {if ((options & 8) && (data == 0) && (cnt_chars < point_pos)) {if (options & 1) *buf = asc_minus; else *buf = asc_space; options &= ~1; } else {if ((cnt_chars == point_pos) && (options & 0x70)) /*store point*/ {*buf = asc_point; cnt_chars--; buf--; } *buf = bin2asc_u8(data); /*store ASCII digit*/ } cnt_chars--; buf--; data >>= 4; } if (options & 1) *buf = asc_minus; }
Автор: alekseyb Dec 7 2007, 05:58Подсчет CRC для DALLAS 1Wire устройств.Работает очень
быстро. Автор: SasaVitebsk Dec 16 2007, 14:11Матричная клавиатура. Гашение дребезга. Ввод-вывод. Ввод
символьной информации методом нескольких нажатий. Всё для
IAR C. // Инициализировать таймер 0 и прерывания для опроса клавиш #if __ATmega88__ TCCR0A = 0x02; // Режим СТС TCCR0B = 0x5; // FCLK/1024 (14.4KHz/69.4mks) OCR0A = T_INT_TIM*1000000/1024/TCLK; // прерывание T_INT_TIM ms TIMSK0 = 2; // Прерывания от CTC #elif __ATmega8__ TCCR0 = 0x05; // Режим NORMAL, FCLK/1024 (14.4KHz/69.4mks) TIMSK |= 1; // Прерывания от переполнения #endif // Инициализировать оборудование DelayInit(); // Инициализация таймера LCDInit(); // Инициализировать LCD дисплей spliter_init(); // Инициализировать сплитер KeyInit(); // Инициализация клавиатуры WakeInit(); // Инициализация интерфейса rs485 и протокола WakeUp __enable_interrupt(); // Разрешить прерывания Символьный ввод const uint8_t __flash strkey[10][6] = { {'0',' ','-','=','+',0}, {'1',',','.',';',':',0}, {'2','А','Б','В','Г',0}, {'3','Д','Е','Ж','З',0}, {'4','И','Й','К','Л',0}, {'5','М','Н','О',0,0}, {'6','П','Р','С',0,0}, {'7','Т','У','Ф','Х',0}, {'8','Ц','Ч','Ш','Щ',0}, {'9','Ы','Э','Ю','Я',0} }; uint8_t getextchar(void) // Ввести расширенную клавишу { uint8_t c, index, old, tekc, d; index=0; while(KeyPress()==0); // Если установлен бит Int_Key, то клавиша была нажата do { while(KeyPress()!=0); // ждём пока клавишу отпустят c = getchar(); // прочитать код клавиши old=c; // запомнить последнюю нажатую кнопку if(c < '0') return(c); // Если клавиши управления, то выйти else c -= '0'; WaitLong = PAUZA; // Измерить паузу после нажатия tekc=strkey[c][index]; // текущий символ putchar(tekc); // вывести do if(KeyPress()!=0) // Если клавиша была нажата снова { d=KeyPress(); // прочитать код клавиши if(d!=old)return(tekc); // если изменили клавишу, то выйти index++; // Следующий символ из ряда if(strkey[c][index]==0)index=0; // если конец ряда, то выйти putchar(CR_BS); // Забить предыдущий символ break; } while(WaitLong!=0); } while(WaitLong!=0); return(tekc); } Само прерывание опроса клавиатуры и меток времени #ifdef __PORT88__ #pragma vector=TIMER0_COMPA_vect // Метки времени 10 мс #else #pragma vector=TIMER0_OVF_vect // Метки времени 10 мс #endif __interrupt static void MetkiTime10ms(void) { #if __ATmega8__ TCNT0 = -(T_INT_TIM*1000000/1024/TCLK); #endif KeyScan(); // Опросить клавиши KeyStrSet(); // выставить строку if(WaitLong!=0)WaitLong--; // Высчитать задержку } Присоединённые файлы
Kls3x4.zip
( 3.47кб ) Кол-во скачиваний: 166
lcd44780.zip
( 5.18кб ) Кол-во скачиваний: 146
timerhw.zip
( 1.52кб ) Кол-во скачиваний: 133
Автор: Aesthete Animus Dec 18 2007, 12:52Вот ссылка на классную библиотеку 1-wire: Автор: amaora Jan 28 2008, 03:158бит ЦАП/АЦП, или звуко-проигрыватель PCM/ADPCM (11025Hz)
с управлением по EIA-232, или тремя кнопками. писалось в
целях ознакомления с AVR, надеюс будет кому то полезно.
исходник на C и управляющая прожка под linux, http://www.paravozeg.narod.ru/avr_prog_md.tar.gz
Автор: Kybik Feb 5 2008, 00:08Исходник (CVAVR) для декодирования IR пульта старых
телеков Goldstar. Автор: Genadi Zawidowski Feb 13 2008, 02:14AvrStudio + WINAVR, чистый C
|























































 ).
Сами исходные тексты выкладывать лучше аттачем к сообщению
или ссылкой на них. Короткие тексты (в пределах разумного)
допускается публиковать прямо в теле сообщения.
).
Сами исходные тексты выкладывать лучше аттачем к сообщению
или ссылкой на них. Короткие тексты (в пределах разумного)
допускается публиковать прямо в теле сообщения.